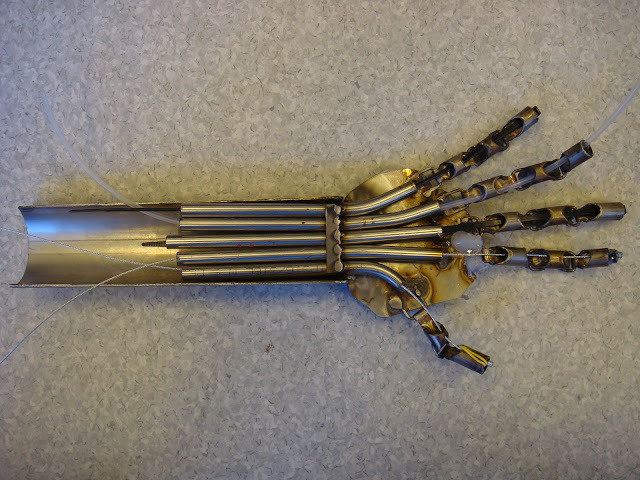
Jeg og to andre karer i klassen har tatt for oss et skoleprosjekt der vi har som mål å lage en mekanisk hand. En av grunnen til at jeg skriver dette her er fordi at vi skal bruke fem stk. Futaba S148 servoer til å dra fingrene. Mye av arbeided går dermed med til å finne signalet, reprodusere signalet og lage en elektronisk logikk for dette. Samt. logikken for eventuelle funksjoner vi ønsker at handen skal gjøre.
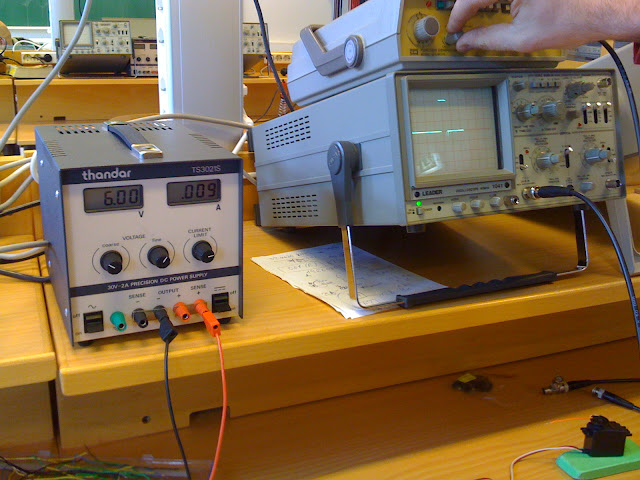
En RC servo har tre innganger. Pluss (rød), minus (svart/brun) og en signal ledning (hvit/gul). Spenningen til en servo ligger på 4.8v-6.0v og signalet på 3.3v. Grunnen til at spenningen har forskjellig spenning er fordi motoren behøver mer effekt enn kretsen.
Strømen på pluss/minus er konstant, men signalet har en spesefikk puls som bestemmer hvilken grad servoen skal stille seg i. 0-180°. En positiv puls på 1-2ms er nødvendig for at servoen skal forstå signalet. Hvis den positive pulsen er på 1ms, stiller servoen seg i 0°, 1,5ms i 90°, som vi kjenner som nøytral og 2ms 180°.
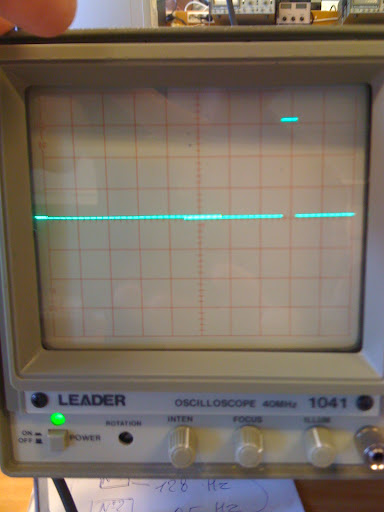
Her er signalet på et oscilloscope når servoen er i 0°, altså en 1ms lang puls på snaue 3.3v.
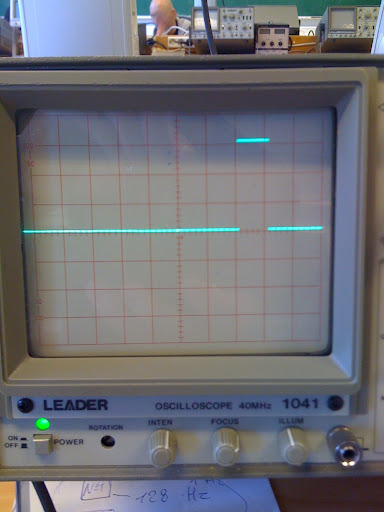
2ms puls.
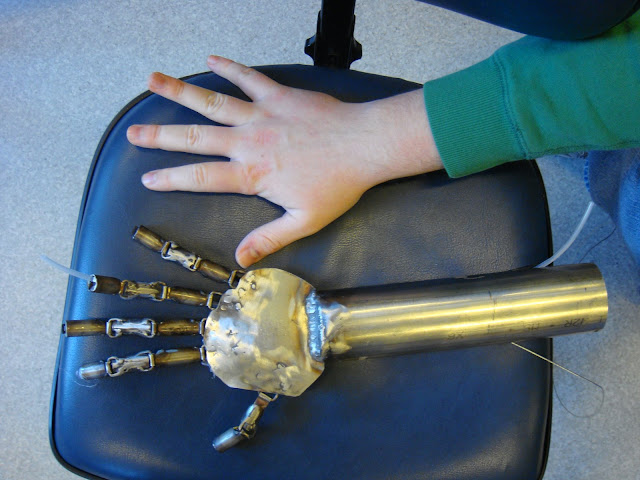
Handen har vi laget selv i rustfrittstål. Noen bilder av handen så langt i prosessen.
Du finner muligens mer info og bilder på siden min (se sign). Still gjerne spørsmål!
 Været
Været






